Project Summary:
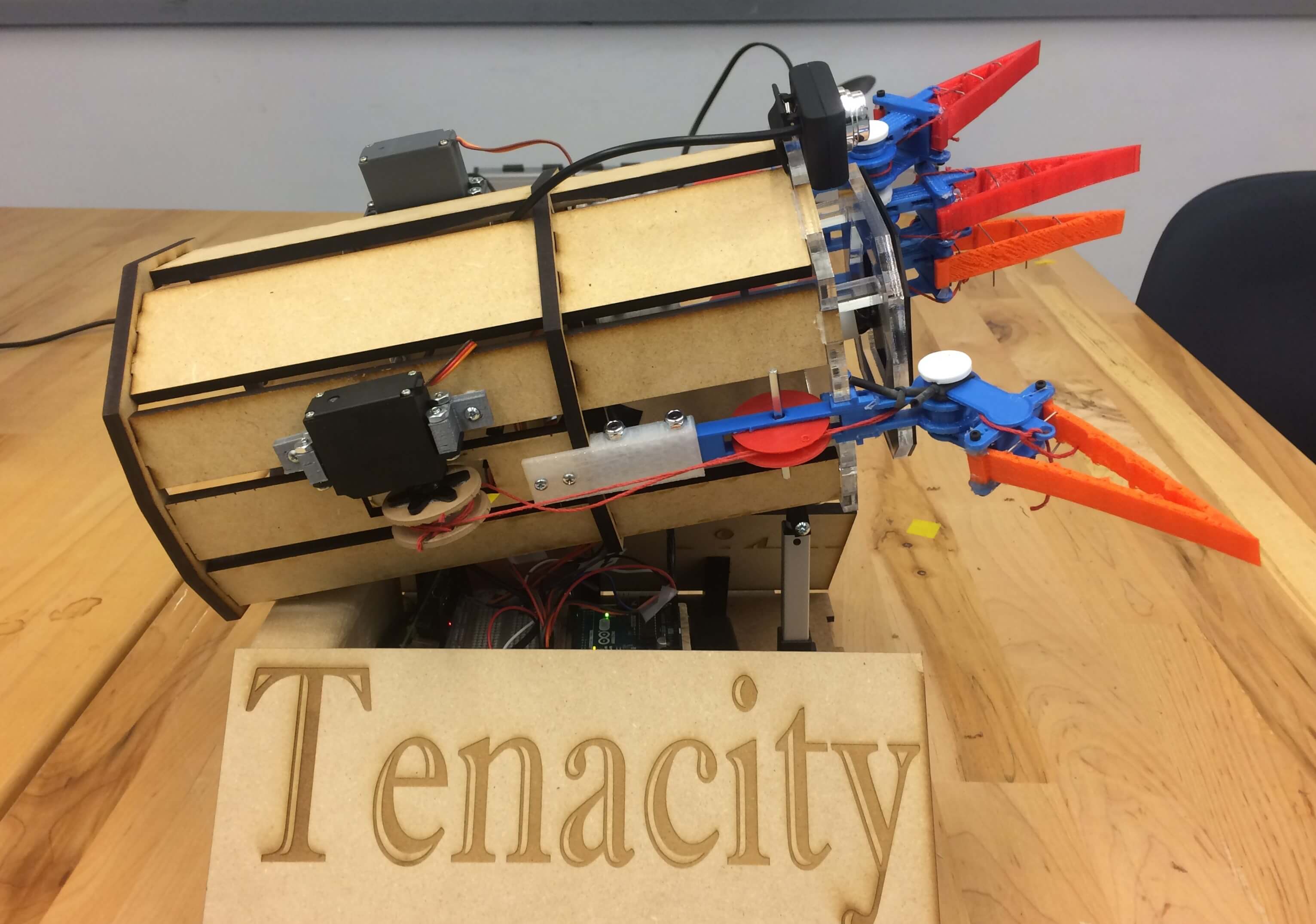
In this project, my team designed and fabricated an autonomous robot hand capable of manipulating a variety of objects with appropriate grip strength.
The hand employed a hybrid tendon-driven system with both active and passive actuation. Its independently operable three fingers and opposable thumb allow the device to achieve a variety of gripping configurations. Further, the compliant fingertips, made of flexible 3D printing filament, allowed the hand to shape to any object it holds.
With infrared and piezoelectric sensors, the hand was also able to detect both when an object was within grasping range and how far to flex each finger for optimal grip performance.
For more information, please see our team’s project website where we documented our research, progress, and pitfalls.